
Une approche ludique par la robotique
Quelques robots célèbres
La première apparition d’un robot sur la toile d’un cinéma remonte à 1927, lorsque Fritz Lang met en scène le double robotique de Brigitte Helm, une maschinenmensch ou « machine-personne » dans le rôle de Maria, un androïde censé apporter la destruction de la cité Métropolis. Bien d’autres robots ont été créés par la suite et mis en scène et beaucoup font référence au « complexe de Frankenstein », bien connu des informaticiens en retard dans leur livraison de code et qui consiste à fabriquer quelque chose avec les moyens du bord sans en garder le contrôle de tous les aspects et qui reviendra hanter son créateur par la suite en se retournant contre lui.
C’est pourquoi la maîtrise de la puissance intellectuelle et de la force physique des robots a toujours été un élément de la littérature futuriste, que ce soit en glorifiant les moyens engagés pour y parvenir ou en décrivant les ravages d’une perte de contrôle. Incontournables dans les romans, films ou séries, les robots sont perçus par le jeune public, comme par les moins jeunes aussi, sous leur aspect ludique plutôt qu’utilitaire et le monde guerrier n’est jamais très loin puisque parmi les premières idées de robots en phase de conception figurent les robots combattants. Il faut probablement y voir une mise en garde par la manifestation d’un instinct combatif là où aucune menace pourtant n’est évoquée et rapprocher ce signal aujourd’hui faible aux réflexions récentes de scientifiques comme Stephen Hawking ou d’industriels comme Elon Musk sur l’application de l’intelligence artificielle et de la mécatronique à la fabrication de robots guerriers.
1. Robbie
En 1940, Isaac Asimov donnait ce nom à un gentil robot conçu pour s’occuper des enfants. Ce sont le prémices d’une œuvre considérable parmi laquelle figure le recueil de nouvelles I, Robot, qui a pour la première fois posé les trois lois de la robotique. Asimov a également imaginé un cerveau « positronique » plutôt...
Les kits de découverte du marché
Auparavant cantonnés à quelques composants, principalement des moteurs et des servomoteurs, qui accompagnaient un microcontrôleur de type Arduino UNO, les kits de découverte se sont étoffés avec l’ajout de capteurs et de modules d’affichage. Les exemples de montages qui les accompagnent sont devenus plus élaborés et permettent aux apprentis roboticiens d’apprendre un langage de base de la conception de robots par la mise en œuvre d’éléments unitaires qui peuvent ensuite être intégrés.
Le choix est grand en matière de kits permettant de réaliser des montages plus ou moins évolués avec un microcontrôleur Arduino.
Les kits de base permettent de réaliser plusieurs montages assez basiques comme le pilotage de moteurs ou de servomoteurs, l’affichage par des LED et la gestion de capteurs. Sur un plan pédagogique, ils permettent l’apprentissage de l’automatisme et de la programmation en réalisant un système de feux tricolores auquel seront ajoutées progressivement des fonctions évoluées comme une temporisation variable ou la gestion des appels par les piétons. Cet exemple, et sa version plus complexe qui est le pilotage existent depuis que les cours d’automatisme existent et le microcontrôleur a remplacé...
L’approche « maker » et le recyclage d’objets
L’approche maker vise à donner à un objet, à un groupe d’objets ou aux parties d’un objet une utilité autre que celle qui était la leur lors de leur conception. Elle est fondée sur une logique d’économie par le recyclage et de créativité par l’extension des fonctionnalités d’un objet technique ou la découverte de nouvelles possibilités à l’aide de techniques de créativité et d’innovation.
C’est en démontant des objets techniques de la vie quotidienne et en observant dans le détail leur mécanisme pour en comprendre le fonctionnement, que l’on assimile un langage technologique. Les fabricants industriels ont en effet une gamme de composants de base qu’ils organisent en machines ou équipements selon la logique d’une gamme opératoire qui aura été définie de façon à optimiser les coûts et à produire en grande quantité. Dans le formalisme qui décrit les différents composants et les tâches à réaliser, par exemple, il existe un symbole qui correspond à un tiroir : schématiquement, un tiroir « s’ouvre » à l’appel d’une commande, s’arrête tout...
1 pile + 1 Arduino + quelques composants + 2 servomoteurs = un robot suiveur de ligne
Imaginons qu’en chinant dans une brocante d’électroniciens (elles n’existent pas encore, mais cela arrivera forcément d’ici quelque temps), un amateur de robots trouve les composants suivants :
-
Une pile 9 V .
-
Un Arduino UNO .
-
Deux servomoteurs à rotation continue, non identifiables en tant que tels au premier abord, mais un coup d’œil sur Internet montre qu’il s’agit bien de cela .
-
Une rampe de sic capteurs infrarouges couplés à des photodiodes .
-
C’est tout.
Avec ce kit rudimentaire, il est possible de réaliser un robot autonome suiveur de ligne qui était autrefois, il y a un peu plus de trente ans, le but ultime des compétitions de mini-robots, de la taille d’un ballon de basket quand même, que l’on appelait des « souris ».
Pour réaliser ce robot autonome, la trame capteurs-commande-actionneurs, s’applique facilement.
1. Les capteurs
Les mini-rampes de capteurs optocouplés ont été commercialisées pour le suivi de ligne, mais c’est un dispositif très utilisé dans les automatismes industriels pour détecter la présence d’une pièce sans contact. Le signal lumineux et invisible émis par la LED infrarouge n’est capté que lorsqu’une pièce passe devant son faisceau et le fait réfléchir sur la photodiode placée juste à côté.
Il y a une transition de signal qui est classiquement détectée par un circuit bascule (un peu comme pour la neutralisation du rebond d’un bouton poussoir). Avec Arduino, c’est un passage à l’état LOW (valeur zéro sur un port) ou HIGH (valeur 1) qui est à détecter avec une condition « si... alors... sinon ».
Ce dispositif se décline en détectant un changement de couleur sombre ou claire et peut s’étendre à la détection de couleur en exploitant la longueur d’onde...
Simplifier pour expérimenter
Le montage précédent a montré qu’un kit de composants très complexe n’était pas forcément nécessaire pour réaliser un montage concret et que la simplicité était un atout, voire une vertu.
« Tout ce qui est simple est faux, tout ce qui ne l’est pas est inutilisable », écrivait Paul Valéry. Cette citation a priori paradoxale est pleine de bon sens et riche d’enseignements, en particulier pour la didactique des sciences et la pédagogie de la robotique.
Les phénomènes étudiés lors d’expériences ou à l’œuvre lors du fonctionnement de machines répondent aux lois de la physique et de la mécanique selon des relations qui peuvent être complexes et difficiles à expliquer. Les équations du mouvement ou de la chute des corps peuvent être perçues de façon intuitive et en même temps nécessiter des calculs complexes pour en démontrer les effets. En particulier, l’expérience de Galilée laisse penser qu’un corps plus lourd arrivera plus vite au sol et sa réalisation laisse perplexe.
Une manière de permettre une approche progressive des lois qui régissent cette expérience est de constituer un banc d’essai qui permet de libérer...
La documentation utile : les pas à pas
Il existe probablement deux certitudes sur la documentation et elles sont en apparence presque contradictoires. La première est que la documentation est indispensable et en général rédigée tardivement, dans l’urgence et sous la pression des utilisateurs, mais elle est impérative. La deuxième est qu’elle est rarement lue ou exploitée parce que se voulant exhaustive, elle apparaît trop dense ou trop structurée. Les explications sur la syntaxe du code, par exemple, sont illustrées par des programmes de démonstration qui mettent en œuvre d’autres instructions dont la compréhension renvoie à d’autres rubriques avec d’autres exemples en suivant le fil de plusieurs liens hypertextes. Si ces liens ne sont pas « câblés » en un circuit comprenant un nombre limité de chemins et facilitant la compréhension des tours et contours de l’instruction visée, le lecteur décrochera devant une rapide saturation de sa mémoire.
Le pas à pas est plus efficace et garde la même valeur pédagogique si les concepts et les principes sont introduits au bon moment et de la bonne façon, c’est-à-dire en respectant la progression de la connaissance de l’utilisateur dans ce qui est un apprentissage. Les spécialistes...
ERA : les trois séquences d’un atelier de robotique ou de programmation : enseigner, réfléchir, appliquer
L’approche ERA ou enseigner-réfléchir-appliquer est originale et a été utilisée avec succès lors d’ateliers avec des jeunes publics ou des adultes, qu’ils soient simples participants ou animateurs et enseignants en formation. Elle est simple et particulièrement efficace.
1. Enseigner
Les exemples qui ont précédé ont mis l’accent sur une dimension supérieure à celle de la simple technique et souligné l’importance de l’approche pédagogique.
À cette approche, qui est évidente pour les professionnels de l’enseignement et de la formation, s’ajoute une caractéristique qui a trait à la conduite du changement. Elle concerne l’apprentissage en double boucle tel que le psychologue Chris Argyris l’a théorisé, et qui trouve sa pleine application dans les changements de paradigmes techniques, des relais ou circuits intégrés au microcontrôleur par exemple, ou méthodologiques, de la programmation textuelle à la programmation visuelle, autre exemple.
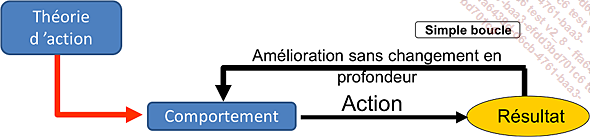
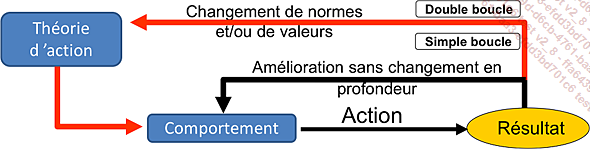
Pour Chris Argyris, il existe deux niveaux d’apprentissage : en simple et en double boucle :
-
En simple boucle, l’individu corrige son comportement face à un écart entre l’objectif poursuivi et le résultat obtenu, sans modifier les théories qui sous-tendent son action .
-
En double boucle, il y a une remise en cause des théories d’action (affirmées ou d’usage) avec une correction qui implique de changer les normes et les valeurs de l’individu.
L’enseignant, le formateur ou l’animateur devra donc prendre en compte ces deux niveaux d’apprentissage et être particulièrement vigilant face à celui de la double boucle qui implique de prendre en compte une résistance naturelle au changement, plus ou moins forte selon la disposition du participant et selon son acceptation de la remise en cause de ses pratiques ou de ses habitudes.
Par exemple, passer de la programmation d’un microcontrôleur par le code C++ à sa génération avec mBlock va induire une justification de la programmation textuelle...
